{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/topic/topicMQXQWB.jpg', '推荐 adingx 的文章《51单片机按键控制步进电机加减速及正反转》','https://www.xiaopingtou.net/article-104291.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
之前尝试用单片机控制42步进电机正反转,电机连接导轨实现滑台前进后退,在这里分享一下测试程序及接线图,程序部分参考网上找到的,已经实际测试过,可以实现控制功能。 所用硬件:步进电机及驱动器、STC89C52单片机、直流电源
1、硬件连接图
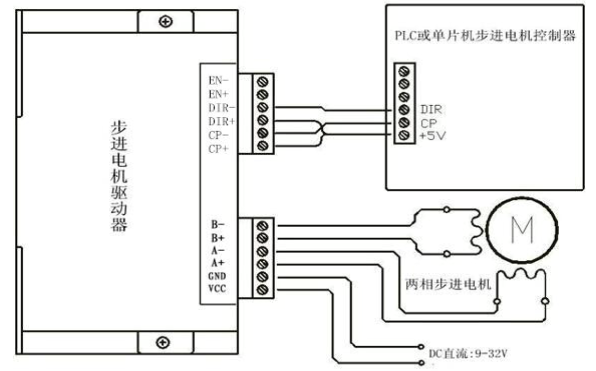

- 注意:上图为共阳极接法,实际连接参考总体线路连接。
- 驱动器信号端定义:
- 电机绕组连接
- 电源连接
- 总体线路连接
输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信 号DIR+,DIR-③脱机信号EN+,EN-。输入信号接口有两种接法,可根据 需要采用共阳极接法或共阴极接法。
在这里我采用的是共阴极接法:分别将 PUL-,DIR-,EN-连接到控制系统的地端(接入单片机地端); 脉冲输入信号通过PUL+接入单片机(代码中给的P2^6脚),方向信号通过DIR+接入单片机(代码中给的P2^4脚),使能信号通过EN+接 入(不接也可,代码中未接,置空)。按键连接见代码,分别用5个按键控制电机启动、反转、加速、减速、正反转。 注意:接线时请断开电源,电机接线需注意不要错相,相内相间短路, 以免损坏驱动器。2、代码
#include3、常见问题解答
- 控制信号高于5v一定要串联电阻,否则可能会烧坏驱动器控制接口电路。
- 接通电源后如果驱动器灯亮,但是无法控制电机旋转,考虑控制部分驱动能力不足或者驱动器所设置的驱动电流不够(我就遇到过这种情况,后来通过调高驱动器限制电流解决的此问题)。如果调高驱动电流步进电机仍无法转动,查看电路板上的按键有没有接对,程序中按键引脚可根据电路板设计的按键引脚连接自行改动。
- 判断步进电机四条线的定义:将任意两条线接在一起,用手旋转电机,如果有阻力,则两条线是同一相。用相同方法测试另外两条线是否是同一相。确定同相的两条线任意接入两相接口,如果旋转方向相反只需换相即可。
- 增加启停及加减速功能代码:https://download.csdn.net/download/weixin_42670445/11978165